加入收藏
加入收藏 首页
首页
“透视”高炉液压煤气放散阀
来源:中国冶金报|浏览:次|评论:0条 [收藏] [评论]
煤气放散阀是为了在高炉休风时,能迅速地将煤气排入大气中而设置的。为了安全,煤气放散阀都设置在煤气上升管的顶部、重力除尘器的上部及顶部等,当高炉休风、复风或开炉时,打开放散阀并通入…
煤气放散阀是为了在高炉休风时,能迅速地将煤气排入大气中而设置的。为了安全,煤气放散阀都设置在煤气上升管的顶部、重力除尘器的上部及顶部等,当高炉休风、复风或开炉时,打开放散阀并通入蒸汽可将煤气驱入大气中。这样可以确保高炉煤气区域的人员与设备安全。当然,高炉炉顶放散阀还承担了高炉紧急休风或炉内压力急剧增加时,迅速将高炉煤气排入大气的任务。对煤气放散阀的要求是操作可靠、密封性好,放散时产生的噪音小。
常见的煤气放散阀按开闭形式可分为垂直开启式、外开式、内开式等,按驱动方式可分为电机驱动与液压驱动等,按密封方式可分为重锤重力密封与弹簧压力密封等。而弹簧压力密封液压驱动式煤气放散阀,在保持了放散阀的性能要求下,还克服了过去电动式放散阀在布置与占地方面的缺点。目前,该类放散阀在国内高炉上的应用有逐渐成为主流的趋势,有必要探讨一下这种阀的结构与运动特征。
液压放散阀的结构特征
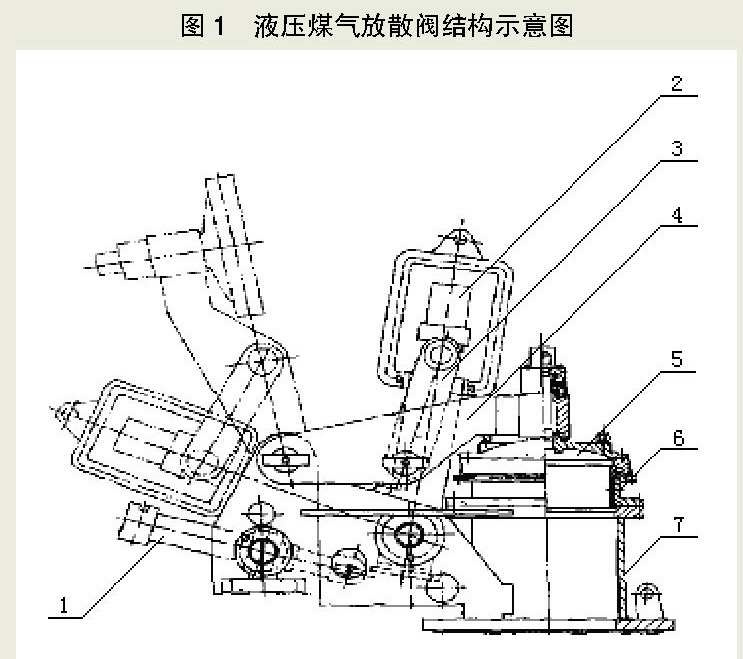
阀的组成。弹簧压力密封液压煤气放散阀的结构如图1所示,主要由液压缸1、弹簧仓2、连杆3、转臂4、阀盖5、阀座6和阀体7组成。其工作原理为:阀门的正常开启是靠液压缸1实现的,液压缸1工作时,液压缸1的无杆腔进油,使活塞杆做外伸推动,从而实现与弹簧仓2相连的摆杆的逆时针转动,弹簧仓2通过连杆3带动转臂4做逆时针转动,使阀盖5开启;液压缸1逆运动时实现阀盖5关闭,阀门关闭时,液压缸1的有杆腔进油,使液压活塞杆做内收运动,通过与之相连的活塞杆内收,使与弹簧仓2相连的摆杆做顺时针转动,弹簧仓2通过连杆3带动转臂4做顺时针转动,使阀盖5关闭。当阀盖5关闭时,液压缸1锁定,此时活塞杆与弹簧仓筒也同时被锁住,阀盖5通过弹簧仓芯的弹簧压力紧紧压在阀座6上,实现压力密封。当高炉炉内压力大于弹簧力时,阀盖5带动转臂4压缩弹簧仓芯的弹簧,使阀盖5微开,从而达到放散减压的目的。
机构自由度。将图1弹簧压力密封液压煤气放散阀的结构进行机构简化,得到如图2所示的机构简图。其主要由液压缸1、液压杆2、摆杆3、弹簧仓4、弹簧杆6、连杆7、转臂8和阀盖9等组成,共有6个活动构件。其低副为:液压缸1与支座间的转动副、液压缸1与液压杆2间的移动副、液压杆2与摆杆3间的转动副、摆杆3与支座间的转动副、弹簧仓4与弹簧杆6间的移动副,弹簧杆6与连杆7间的转动副、连杆7与转臂8间的转动副、转臂8与支座的转动副,共计8个低副;高副没有。因而,该机构自由度F为:F=3n-2pl-ph=3×6-2×8=2(式中:n为活动构件数,pl为低副数,ph为高副数)。
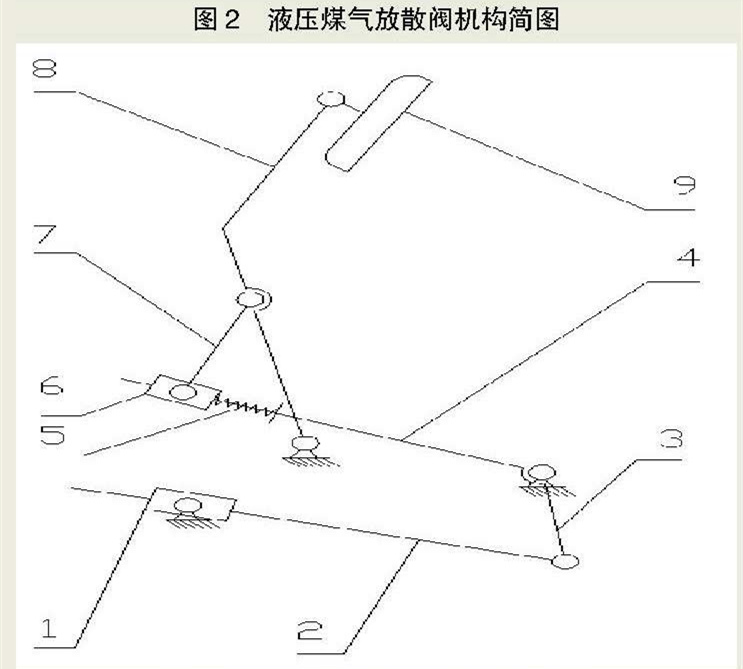
该机构两个自由度中的一个自由度被弹簧约束,这时机构就呈现为一个摆动导杆机构串联一个双摆杆机构,机构在运动时只有一个自由度,液压缸驱动时,机构有确定的运动,这样机构满足阀的运动功能。而当阀关闭时,液压缸锁定,即锁住了一个自由度;若炉内压力大于弹簧力时,机构的第二个自由度被释放,这时机构满足阀的安全功能。
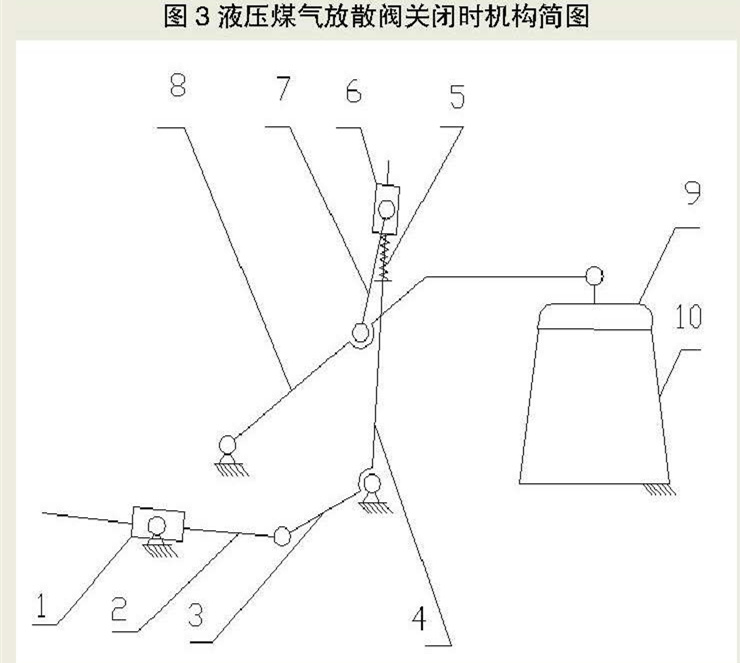
结构特征。这种放散阀的传动机构是一个平面复合铰链机构,它可以分解为一个摆动导杆四杆机构和一个摆动导杆五杆机构,使这种煤气放散阀具有6个特征。一是驱动方式为液压传动,可克服钢绳牵引布置的局限性。二是密封方式为弹簧压力,可大幅度减小设备的重量。三是如图3所示,在关闭时,由弹簧仓4、连杆7、转臂8组成的摆动导杆五杆机构相对于转臂8具有自锁能力,这样就提高了关闭的可靠性。四是阀盖与转臂连接采用双组球面连接,配合阀盖与阀座的硬密封面为球面与锥面的情况,使阀盖在关闭时具备一定自调能力。五是密封形式采用软硬双重密封,外软内硬,使硬密封减压、软密封密封,这样既实现了可靠的密封,又延长了软密封的使用寿命。六是在开启时,阀盖处于放散气流之外,既实现了顺畅放散,又避免损伤设备。
机构的型数分析
如前所述,该机构工作过程就是液压缸带动阀盖开关的过程,经过分析,可将这一过程细分为5个阶段,即阀的启动关或开到位阶段、阀的开关阶段、阀盖与阀座接触阶段、液压缸锁住阶段和炉内压力将阀盖顶开阶段。下面具体分析这5个阶段机构的型数变化。
阀的启动关或开到位阶段。当阀启动关或开到位时,由于惯性力的作用,弹簧仓的自由度被弹簧释放,弹簧起缓冲作用,此时机构就转化为一个七连杆机构,其运动链如图4所示。该运动链为双回路,一个回路为四杆链,一个回路为五杆链,图中构件数为7,其中支座为机架,是固定构件,因此,活动构件数为6,低副数为8,高副数为0。其机构自由度:F=3n-2pl-ph=3×6-2×8=2。
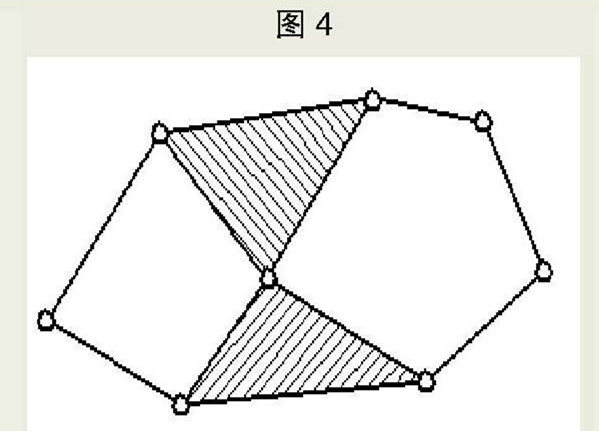
从图4的双回路来看,四杆链有确定的运动,而五杆链多一个自由度为弹簧的局部自由度,它只起缓冲作用,故也具有确定的运动。因此,该串联双回路七杆机构是具有缓冲功能的一个运动自由度机构。
阀的开关阶段。图2所示的阀开关过程中,由于弹簧仓4的自由度被弹簧约束,此时机构中弹簧仓4与弹簧杆6间的移动副丧失,弹簧仓4与弹簧杆6形成为一个构件,图4双回路中的五杆链转变为四杆链,其机构就转化为一个六连杆机构,如图5所示。此时机构为一个瓦特链,该链活动构件数为5,低副数为7,高副数为0。其机构自由度:F=3n-2pl-ph=3×5-2×7=1。
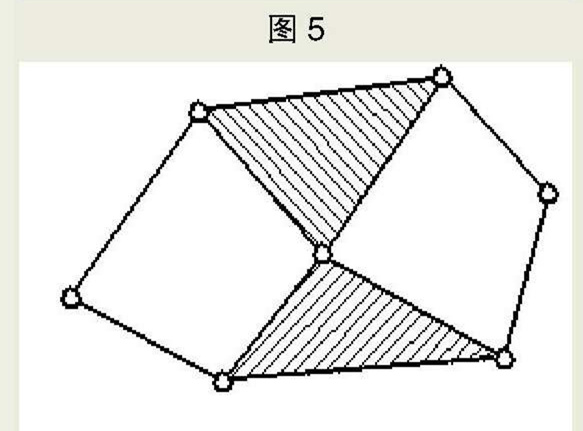
从图5的双回路来看,其为四杆链串联双回路六杆机构,具有唯一确定的运动,故通过一个液压缸驱动能实现阀盖的开关功能。
阀盖与阀座接触阶段。如图3所示,当阀盖9与阀座10接触时,阀盖9与阀座10间的挤压使弹簧仓4的自由度被释放,同时,该机构又增加了一个构件——阀盖9,此时机构转化为一个八连杆机构,其运动链如图6所示。该运动链为三回路,1个回路为四杆链,1个回路为五杆链,增加了1个三杆链。该链活动构件数为7,低副数为10,高副数为0。其机构自由度:F=3n-2pl-ph=3×7-2×10=1。
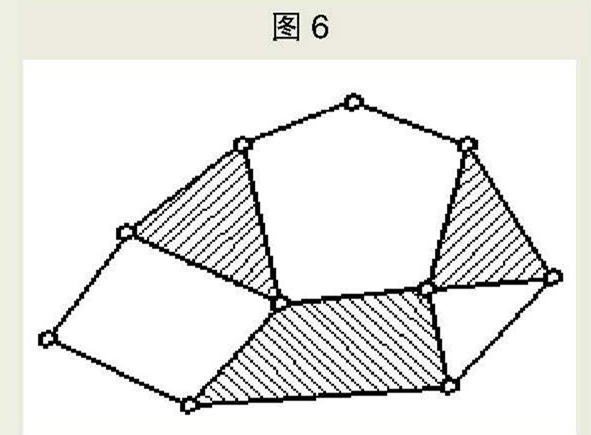
从图6的三回路来看,其为串联三回路八杆机构,一个四杆链串联一个五杆链再串联一个三杆链,实际运动实现在四杆链串联五杆链的两个回路中,该阶段为瞬间过程。
液压缸锁住阶段。如图3所示,当阀盖9到位后,液压缸1锁住,此时液压缸1与液压杆2为一个构件,机构转化为一个七连杆机构,其运动链如图7所示。该运动链为三回路,2个回路为三杆链,1个回路为五杆链。该链活动构件数为6,低副数为9,高副数为0。其机构自由度:F=3n-2pl-ph=3×6-2×9=0。
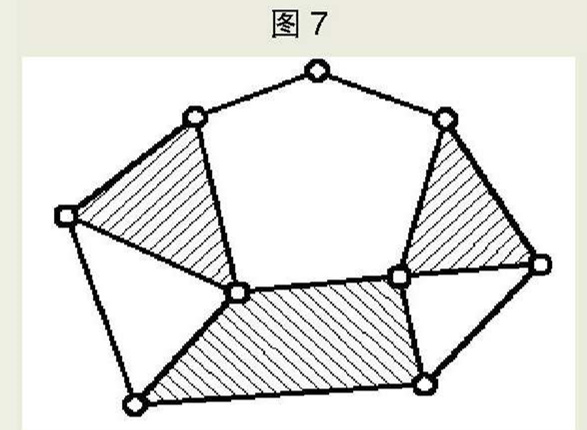
从图7的三回路来看,其为串联三回路七杆机构,由于2个三杆链分置两侧,形成固定构架,从而实现阀的长时间可靠关闭功能。
炉内压力将阀盖顶开阶段。如图3所示,当炉内压力大于弹簧力,将阀盖9顶开时,阀盖9脱离与阀座10接触,机构减少1个三杆链回路,此时机构转化为1个六连杆机构,其运动链如图8所示。其机构自由度:F=3n-2pl-ph=3×5-2×7=1。
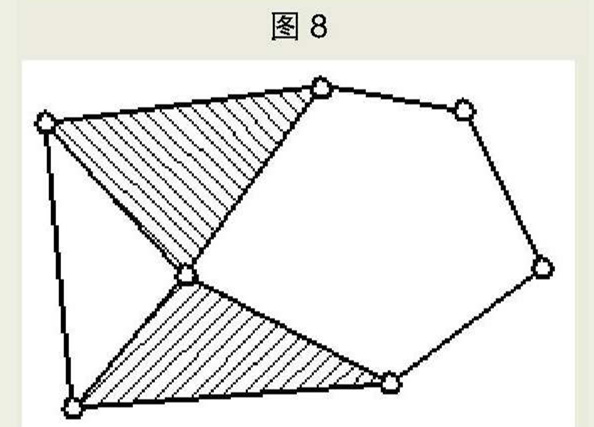
从图8的两回路来看,其为1个三杆链串联1个五杆链的六杆机构,其五杆链回路实现阀的卸压功能。
综上所述,该机构是一个复杂的组合连杆铰链机构,它在整个开关过程中,通过机构的变型来实现不同阶段的功能需求,其对应的5个阶段是启动关(开到位←)→关过程(开过程←)→刚关上(将打开←)→关到位(启动开←)→阀顶开(阀复位←)。相应地,这5个阶段机构转变的型为七连杆机构→六连杆机构→八连杆机构→七连杆机构→六连杆机构,因此,该机构是一个以七连杆机构为基础的变型机构。同时,该机构是一个变自由度机构,其中,最多有2个自由度。这2个自由度分别满足不同的功能需求——一个满足运动的功能需求,另一个满足放散与缓冲的功能需求。而在关闭时,自由度为零,这能使机构长时间稳定可靠地实现关闭功能。
- 上一篇:实现“鱼”与“熊掌”兼得 下一篇:BIM技术助高炉检修高质高效
- [腾讯]
- 关键字:无